Использование MediaPipe
MediaPipe Solutions предоставляет набор библиотек и инструментов, позволяющих быстро применять методы искусственного интеллекта (ИИ) и машинного обучения (МО) в ваших приложениях. Вы можете сразу подключить эти решения к своим приложениям, настроить их в соответствии со своими потребностями и использовать на нескольких платформах разработки. Официальный сайт MediaPipe
Установка необходимого и первый запуск
1. Python 3.9-3.12
- Скачать можно на официальном сайте python.org.
- Самые новые версии могут временно не поддерживаться YOLO.
- Прямая ссылка на Python 3.12.10 (100% рабочая)
- При установке нужно устанавливать от имени администратора и поставить галочку в Add to PATH
2. Установить нужные библиотеки
- в командную строку написать:
pip3 install mediapipe opencv-python
3. Запустить тестовый скрип
Запустить python IDLE -> file -> new file
Написать код и сохранить в любую папку
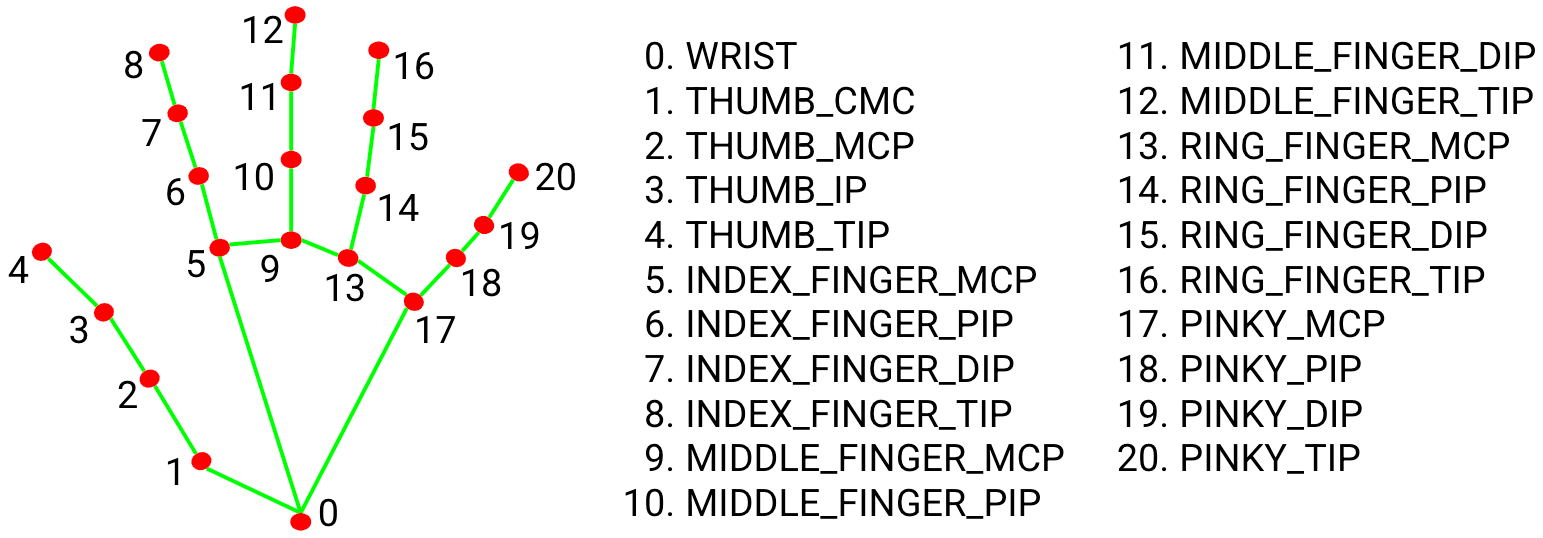
Код находит и отслеживает положение рук и пальцев. Полная статья
import cv2
import mediapipe as mp
import time
mp_hands = mp.solutions.hands
mp_draw = mp.solutions.drawing_utils
mp_style = mp.solutions.drawing_styles
cap = cv2.VideoCapture(0)
with mp_hands.Hands(
model_complexity=1, # 0/1/2: сложность модели. Выше — точнее, но медленнее (по умолчанию 1)
max_num_hands=4, # максимум обнаруживаемых рук в кадре
min_detection_confidence=0.5, # порог уверенности для первичного детекта рук (0..1)
min_tracking_confidence=0.5 # порог для продолжения трекинга; ниже — вернётся к детекту (0..1)
) as hands:
while cv2.waitKey(1) != 27:
ok, frame = cap.read()
if not ok: break
frame = cv2.flip(frame, 1)
start_time = time.perf_counter()
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
res = hands.process(rgb)
if res.multi_hand_landmarks:
for lm, hness in zip(res.multi_hand_landmarks, res.multi_handedness):
mp_draw.draw_landmarks(
frame, lm, mp_hands.HAND_CONNECTIONS,
mp_style.get_default_hand_landmarks_style(),
mp_style.get_default_hand_connections_style()
)
end_time = time.perf_counter()
fps = 1 / (end_time - start_time)
cv2.putText(frame, f"FPS: {int(fps)}", (50, 90), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(frame, f"Press 'Esc' to exit", (50, 50), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2, cv2.LINE_AA)
cv2.imshow("Hands", frame)
cap.release()
cv2.destroyAllWindows()
Примеры
Facemesh
MediaPipe Face Mesh — это решение, которое оценивает 468 трёхмерных ориентиров лица в режиме реального времени, даже на мобильных устройствах. Полная статья
Face mesh
import cv2
import mediapipe as mp
import time
mp_face = mp.solutions.face_mesh
mp_draw = mp.solutions.drawing_utils
mp_style = mp.solutions.drawing_styles
cap = cv2.VideoCapture(0)
with mp_face.FaceMesh(
static_image_mode=False, # потоковое видео; True — для обработки отдельных фото
max_num_faces=4, # максимум обнаруживаемых лиц в кадре
refine_landmarks=True, # детализированные точки (радужка, губы)
min_detection_confidence=0.5, # порог уверенности первичного детекта (0..1)
min_tracking_confidence=0.5 # порог продолжения трекинга (0..1)
) as face:
while cv2.waitKey(1) != 27:
ok, frame = cap.read()
if not ok:
break
frame = cv2.flip(frame, 1)
start_time = time.perf_counter()
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
res = face.process(rgb)
if res.multi_face_landmarks:
for lm in res.multi_face_landmarks:
# Треугольная сетка лица
mp_draw.draw_landmarks(
frame, lm, mp_face.FACEMESH_TESSELATION,
landmark_drawing_spec=None,
connection_drawing_spec=mp_style.get_default_face_mesh_tesselation_style()
)
# Контуры лица
mp_draw.draw_landmarks(
frame, lm, mp_face.FACEMESH_CONTOURS,
landmark_drawing_spec=None,
connection_drawing_spec=mp_style.get_default_face_mesh_contours_style()
)
# Радужки глаз
mp_draw.draw_landmarks(
frame, lm, mp_face.FACEMESH_IRISES,
landmark_drawing_spec=None,
connection_drawing_spec=mp_style.get_default_face_mesh_iris_connections_style()
)
end_time = time.perf_counter()
fps = 1.0 / max(1e-6, (end_time - start_time))
cv2.putText(frame, f"FPS: {int(fps)}", (50, 90),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(frame, "Press 'Esc' to exit", (50, 50),
cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2, cv2.LINE_AA)
cv2.imshow("Face Mesh", frame)
cap.release()
cv2.destroyAllWindows()
Маска очков на лицо. В папку с кодом загрузить файл
{kind=link}
Очки
import cv2
import mediapipe as mp
import numpy as np
import time, math, os
mp_face = mp.solutions.face_mesh
mp_draw = mp.solutions.drawing_utils
mp_style = mp.solutions.drawing_styles
# ==== Параметры ====
PNG_PATH = "glasses.png" # Опционально: PNG c альфа-каналом (очки), центр в середине файла
TINT_ALPHA = 0.35 # Прозрачность затемнения "линз" (0..1)
FRAME_THICK = 4 # Толщина контура "оправы" (px)
SCALE_W = 3 # Ширина очков = IPD * SCALE_W
SCALE_H = 0.45 # Относительная высота очков от ширины
cap = cv2.VideoCapture(0)
# Загрузка PNG, если есть
png_rgba = None
if os.path.isfile(PNG_PATH):
png_rgba = cv2.imread(PNG_PATH, cv2.IMREAD_UNCHANGED)
def alpha_blend_rgba(bg_bgr, fg_rgba, cx, cy):
"""Альфа-наложение RGBA поверх bg, центрируя в (cx,cy)."""
fh, fw = fg_rgba.shape[:2]
x1 = int(cx - fw // 2); y1 = int(cy - fh // 2)
x2 = x1 + fw; y2 = y1 + fh
# Клип по границам
bh, bw = bg_bgr.shape[:2]
x1c, y1c = max(0, x1), max(0, y1)
x2c, y2c = min(bw, x2), min(bh, y2)
if x1c >= x2c or y1c >= y2c:
return
roi_bg = bg_bgr[y1c:y2c, x1c:x2c]
roi_fg = fg_rgba[(y1c - y1):(y2c - y1), (x1c - x1):(x2c - x1)]
alpha = (roi_fg[..., 3:4].astype(np.float32)) / 255.0
fg_bgr = roi_fg[..., :3].astype(np.float32)
bg_bgr[y1c:y2c, x1c:x2c] = (alpha * fg_bgr + (1 - alpha) * roi_bg.astype(np.float32)).astype(np.uint8)
def rotate_scale_rgba(img_rgba, angle_deg, scale):
"""Поворот и масштаб RGBA."""
h, w = img_rgba.shape[:2]
M = cv2.getRotationMatrix2D((w/2, h/2), angle_deg, scale)
out = cv2.warpAffine(img_rgba, M, (w, h), flags=cv2.INTER_LINEAR, borderMode=cv2.BORDER_TRANSPARENT)
return out
def iris_center_px(lm_list, ids, W, H):
xs = [lm_list[i].x * W for i in ids]
ys = [lm_list[i].y * H for i in ids]
return (float(np.mean(xs)), float(np.mean(ys)))
with mp_face.FaceMesh(
static_image_mode=False,
max_num_faces=2,
refine_landmarks=True, # даёт 5 точек радужки на каждый глаз (всего 478)
min_detection_confidence=0.5,
min_tracking_confidence=0.5
) as face:
while cv2.waitKey(1) != 27:
ok, frame = cap.read()
if not ok: break
frame = cv2.flip(frame, 1)
start_time = time.perf_counter()
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
rgb.flags.writeable = False
res = face.process(rgb)
rgb.flags.writeable = True
H, W = frame.shape[:2]
if res.multi_face_landmarks:
# Берём первое лицо
lm = res.multi_face_landmarks[0].landmark
# Индексы радужек (mediapipe, при refine_landmarks=True)
right_iris = [469, 470, 471, 472, 468] # правая (для пользователя — слева)
left_iris = [474, 475, 476, 477, 473] # левая (для пользователя — справа)
# Центры радужек в пикселях
rx, ry = iris_center_px(lm, right_iris, W, H)
lx, ly = iris_center_px(lm, left_iris, W, H)
# Межзрачковое расстояние и угол наклона
ipd = math.hypot(lx - rx, ly - ry)
angle = -math.degrees(math.atan2(ly - ry, lx - rx))
cx, cy = (rx + lx) * 0.5, (ry + ly) * 0.5
# Масштаб по ширине
target_w = max(1, int(ipd * SCALE_W))
scale = target_w / png_rgba.shape[1]
rotated = rotate_scale_rgba(png_rgba, angle, scale)
alpha_blend_rgba(frame, rotated, int(cx), int(cy))
end_time = time.perf_counter()
fps = 1.0 / max(1e-6, (end_time - start_time))
cv2.putText(frame, f"FPS: {int(fps)}", (50, 90),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2, cv2.LINE_AA)
cv2.putText(frame, "Press 'Esc' to exit", (50, 50),
cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2, cv2.LINE_AA)
cv2.imshow("FaceMesh Virtual Try-On", frame)
cap.release()
cv2.destroyAllWindows()
Измерение расстояния для лица. Полная статья
Расстояние
import cv2
import mediapipe as mp
import time, math
# ==== Параметры ====
CALIB_DIST_M = 0.60 # метров: на каком расстоянии нажмёте 'C'
SMOOTH_ALPHA = 0.85 # 0..1, больше — плавнее (эксп. сглаживание)
mp_face = mp.solutions.face_mesh
cap = cv2.VideoCapture(0)
calib_C = None # константа масштаба = ipd_px_at_calib * CALIB_DIST_M
dist_smooth = None
# Индексы центра радужек (нужен refine_landmarks=True)
RIGHT_IRIS_CENTER = 468
LEFT_IRIS_CENTER = 473
with mp_face.FaceMesh(
static_image_mode=False,
max_num_faces=1,
refine_landmarks=True, # включает точки радужки (всего 478)
min_detection_confidence=0.5,
min_tracking_confidence=0.5
) as face:
while True:
ok, frame = cap.read()
if not ok: break
frame = cv2.flip(frame, 1)
start = time.perf_counter()
rgb = cv2.cvtColor(frame, cv2.COLOR_BGR2RGB)
rgb.flags.writeable = False
res = face.process(rgb)
rgb.flags.writeable = True
H, W = frame.shape[:2]
ipd_px = None
if res.multi_face_landmarks:
lm = res.multi_face_landmarks[0].landmark
# Берём центры радужек
rx, ry = lm[RIGHT_IRIS_CENTER].x * W, lm[RIGHT_IRIS_CENTER].y * H
lx, ly = lm[LEFT_IRIS_CENTER].x * W, lm[LEFT_IRIS_CENTER].y * H
ipd_px = math.hypot(lx - rx, ly - ry)
# Визуализация центров
cv2.circle(frame, (int(rx), int(ry)), 3, (0,255,255), -1, cv2.LINE_AA)
cv2.circle(frame, (int(lx), int(ly)), 3, (0,255,255), -1, cv2.LINE_AA)
cv2.line(frame, (int(rx), int(ry)), (int(lx), int(ly)), (0,255,255), 2, cv2.LINE_AA)
# Оценка дистанции
if calib_C is not None and ipd_px and ipd_px > 1:
dist_m = calib_C / ipd_px # d ≈ (s0*d0)/s
if dist_smooth is None:
dist_smooth = dist_m
else:
dist_smooth = SMOOTH_ALPHA*dist_smooth + (1-SMOOTH_ALPHA)*dist_m
text = f"Distance: {dist_smooth:.2f} m"
else:
text = "Press 'C' at known distance"
# HUD
end = time.perf_counter()
fps = 1.0 / max(1e-6, (end - start))
cv2.putText(frame, f"FPS: {int(fps)}", (20, 40),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0,255,0), 2, cv2.LINE_AA)
cv2.putText(frame, text, (20, 80),
cv2.FONT_HERSHEY_SIMPLEX, 1, (255,255,0), 2, cv2.LINE_AA)
if ipd_px:
cv2.putText(frame, f"IPD px: {ipd_px:.1f}", (20, 120),
cv2.FONT_HERSHEY_SIMPLEX, 1, (255,0,255), 2, cv2.LINE_AA)
if calib_C is not None:
cv2.putText(frame, f"Calib C: {calib_C:.1f}", (20, 160),
cv2.FONT_HERSHEY_SIMPLEX, 1, (0,200,255), 2, cv2.LINE_AA)
cv2.putText(frame, "C=Calibrate Esc=Exit", (20, H-20),
cv2.FONT_HERSHEY_SIMPLEX, 1, (200,200,200), 2, cv2.LINE_AA)
cv2.imshow("Iris distance meter", frame)
k = cv2.waitKey(1) & 0xFF
if k == 27: # Esc
break
elif k in (ord('c'), ord('C')):
# Калибровка: на расстоянии CALIB_DIST_M нажмите 'C'
if ipd_px and ipd_px > 1:
calib_C = ipd_px * CALIB_DIST_M
dist_smooth = None # сброс фильтра
cap.release()
cv2.destroyAllWindows()